Lab 9 mapping
Overview
- Goal: Sensing the environment nearby.
- Highlevel:
- Rotate the car in place and measure the distance with Time-Of-Flight sensor during the rotation.
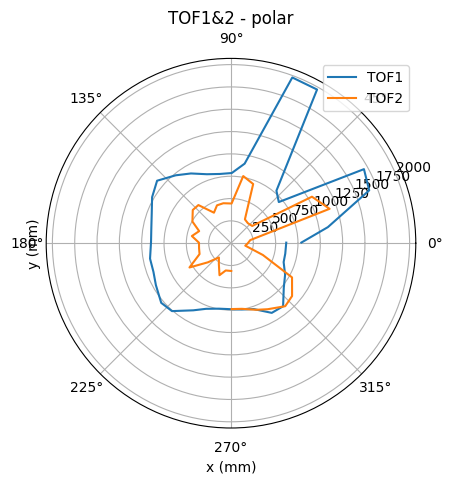
- Put the orientation and the tof readings in polar coordination, and then convert them into Cartesian coordination.
- Repeat the step1&2 in several different location and combine them together to get the map of the room.
- Technical Approach(Pseudocode):
num_reading=0; if (current orientaion is close to set orientaion){ u=0; if (num_reading<num_ori_rotation){ tof sensing; num_reading+=1; Setori+=rotate_degree calibrate Setori to within (-180,180] }else{ allowrun=false; } } else continue on current rotation
Data collection and saving
- Point1:
- Point2:
- Point3:
- Point4:
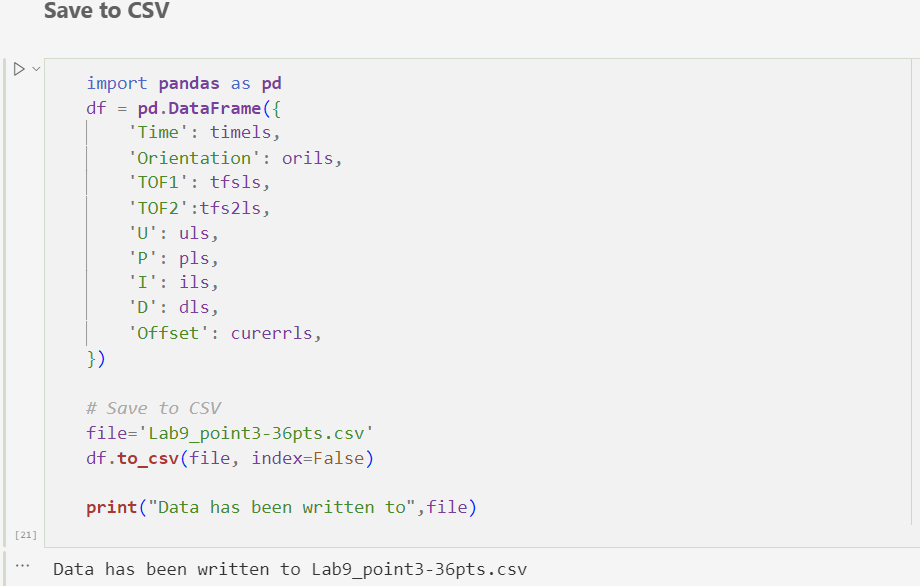
- Then, I used the following python code to save the readings to csv files:
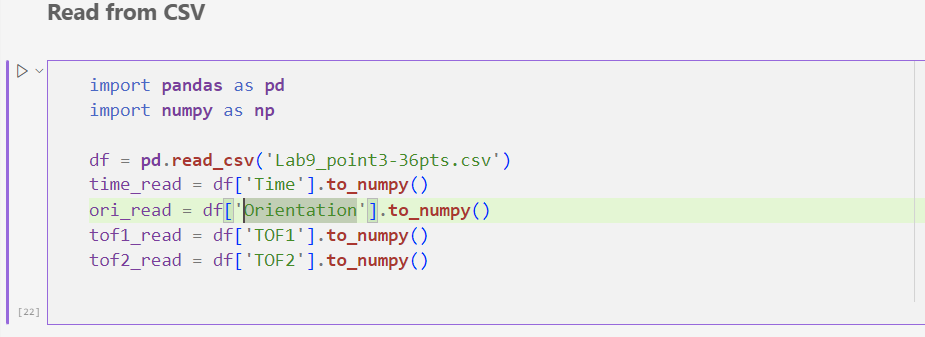
- And read from the saved csv with:
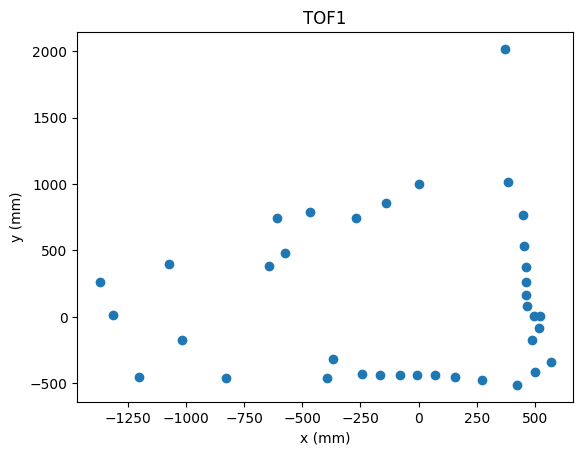
- Next, apply the translation matrix:
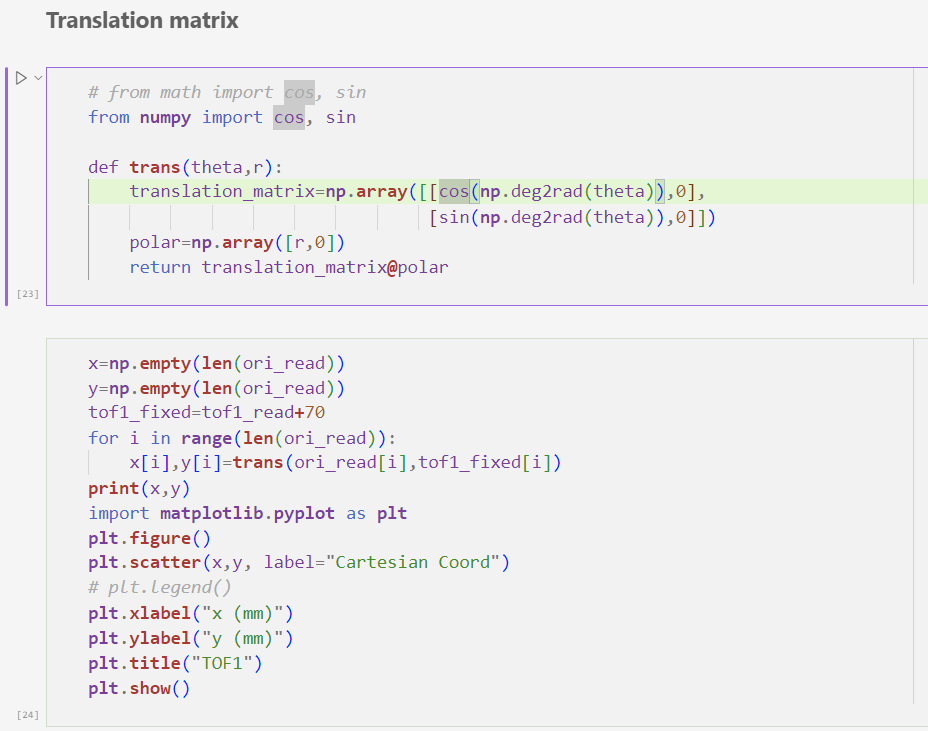
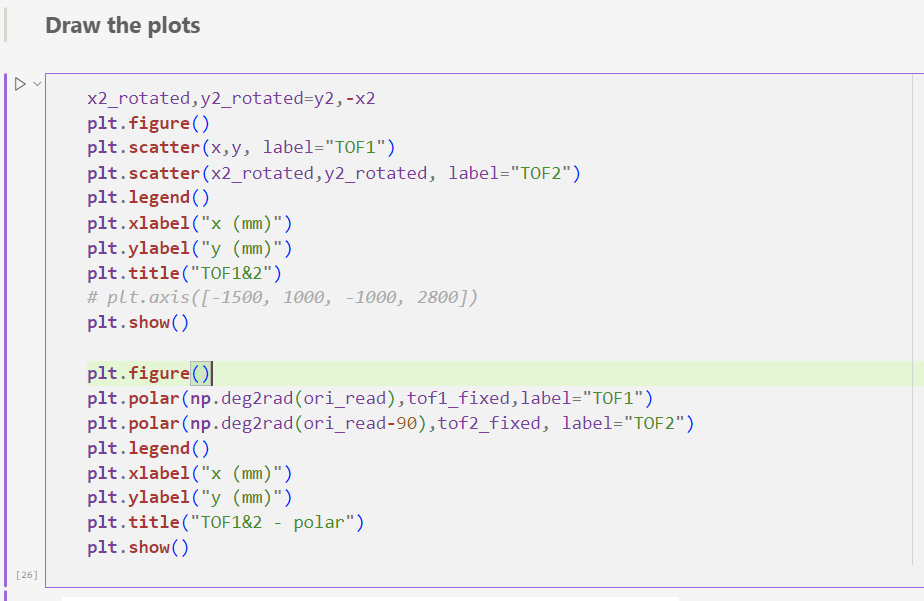
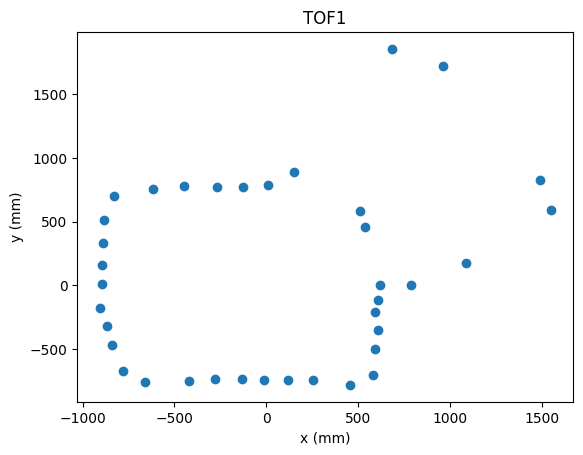
- Last, draw it out:
Chanllenges
- Tunning PID values
- tunning the PID values has been done in lab6; however, after I used a new battery, the voltage changed from 3.67v to 4.18v, and I have to retune the PID values.
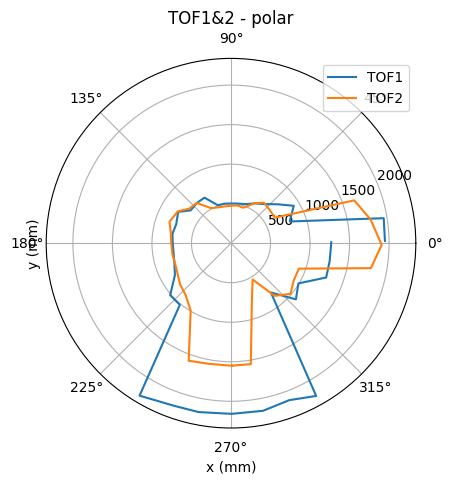
- Time-Of-Flight sensor 2 doesn’t work
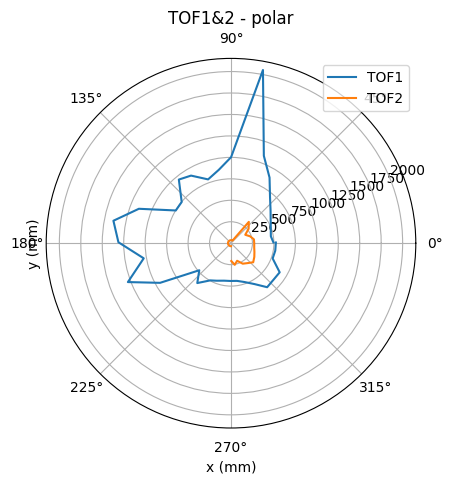
- Due to unknown reason, the readings from Time-Of-Flight sensor 2 is only the half of that of TOF 1, and it’s not reflecting the room’s shape at all. To resolve this, I decide to discard the readings from TOF2, and get more data from TOF1; This is the reason why I choose read TOF every 10 degree to get 36 readings every cycle instead of the 20 degree in the handout.
Showcase
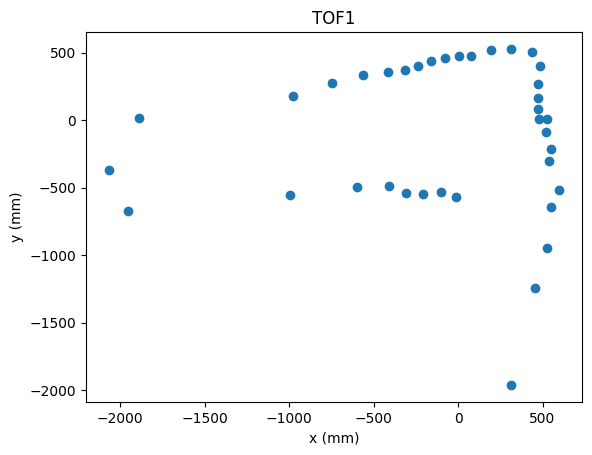
- Point1:
-
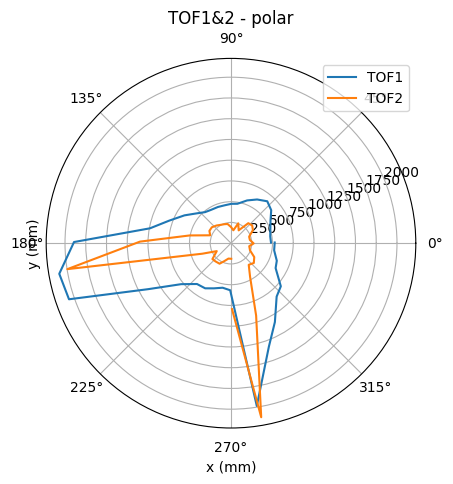
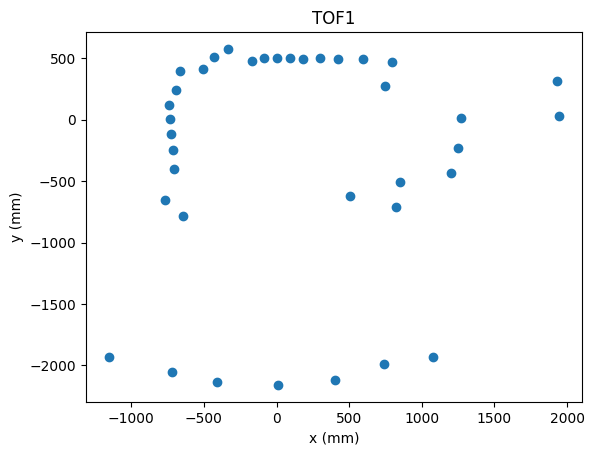
- Point2:
-
- Point3:
-
- Point4:
-
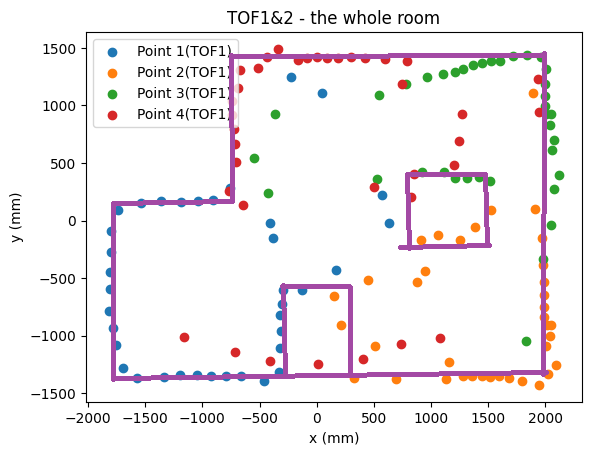
- Combine all of them together:
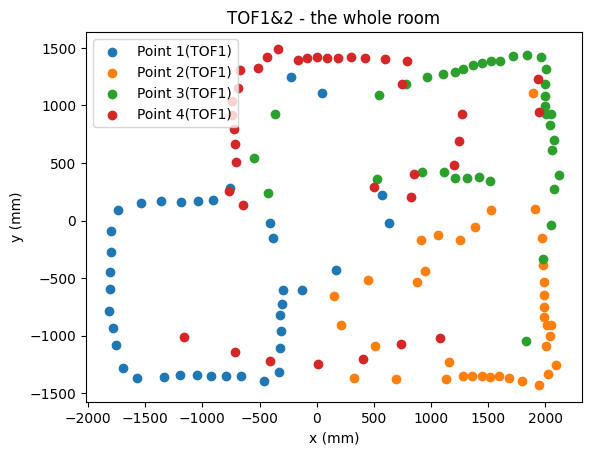
- Then draw the lines to connect the dots: